iROB Navitec Representative of Turkey.
TRAFFIC AND FLEET CONTROL SOFTWARE
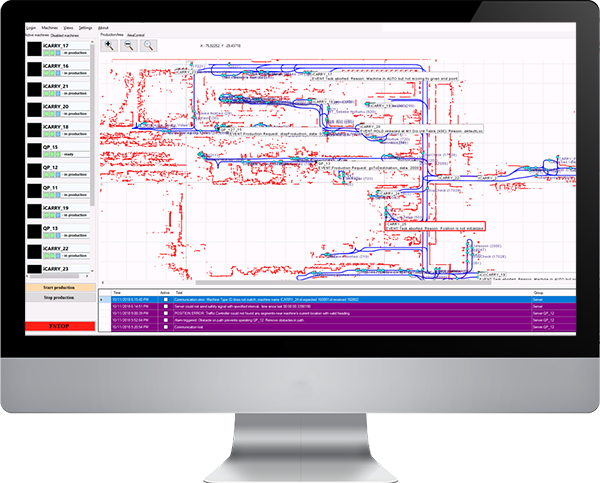
Fleet control software takes ME/WMS transport tasks and converts them into cleverly planned orders for the AGV fleet. Task reporting and logging allows production to be performed permanently and the full tracebility of the process.
- AGV task assignement
- AGV resource optimization
- Traffic control for optimal flow
- Monitoring of vehicle and charge status
- Multiple remote clients for operators
- Multiple vehicle types in one system
USER FRIENDLY MAPPING SOFTWARE
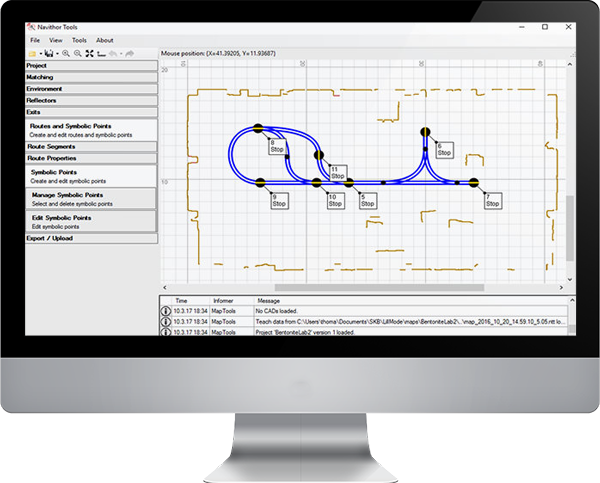
The mapping software is used to update a positioning map to be used by the AGVs from the teaching data recorded by an AGV in teaching mode. A complete map with routes and a map ready to work can be done in a few steps.
The advanced algorithms contained in the software automatically removes errors in the recorded data.
Map features can be set manually in the software.
The design of routes and stations, the definition of production characteristics, the waiting points, the points of reception, charging points etc cen easily be adjusted via software.
AGV MONITORING SOFTWARE
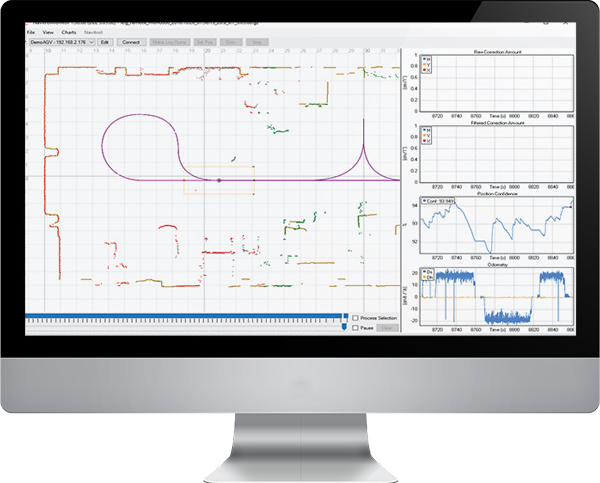
The AGV monitoring software is used to monitor vehicles in real time via the navigation map, including the route system, and to see performance graphs for functional analysis of vehicle behavior.
The AGV monitoring software is useful for:
- Setting of vehicle navigation parameters
- Testing the driving of vehicles
- Verification of created environments and routes